
Wie ich schon erwähnt habe, schafft auch ein stärkerer Nema 17 Schrittmotor nicht die 2,2 kW Spindel an der Z-Achse der MPCNC sauber und ohne Schrittverluste zu bewegen.
Die benötigten Kleinteile habe ich schon
Da ich Trapezspindel, Schrittmotoren, Lager, Rohre, Schrauben usw. sowieso in grösseren Mengen gekauft habe, ist noch genug über um einen Versuch zu starten. Die Idee ist, alle beweglichen Teile zu verdoppeln und damit mehr Stabilität und gleichzeitig mehr Power (durch mehr Motoren) zu erzielen. Versuchen kann ich’s ja mal – Im Dienste der Wissenschaft quasi. Also Filament bestellt (das einzige, was ich nicht zu hause hatte) und nochmal den 3D-Drucker für ein paar Tage angeworfen…
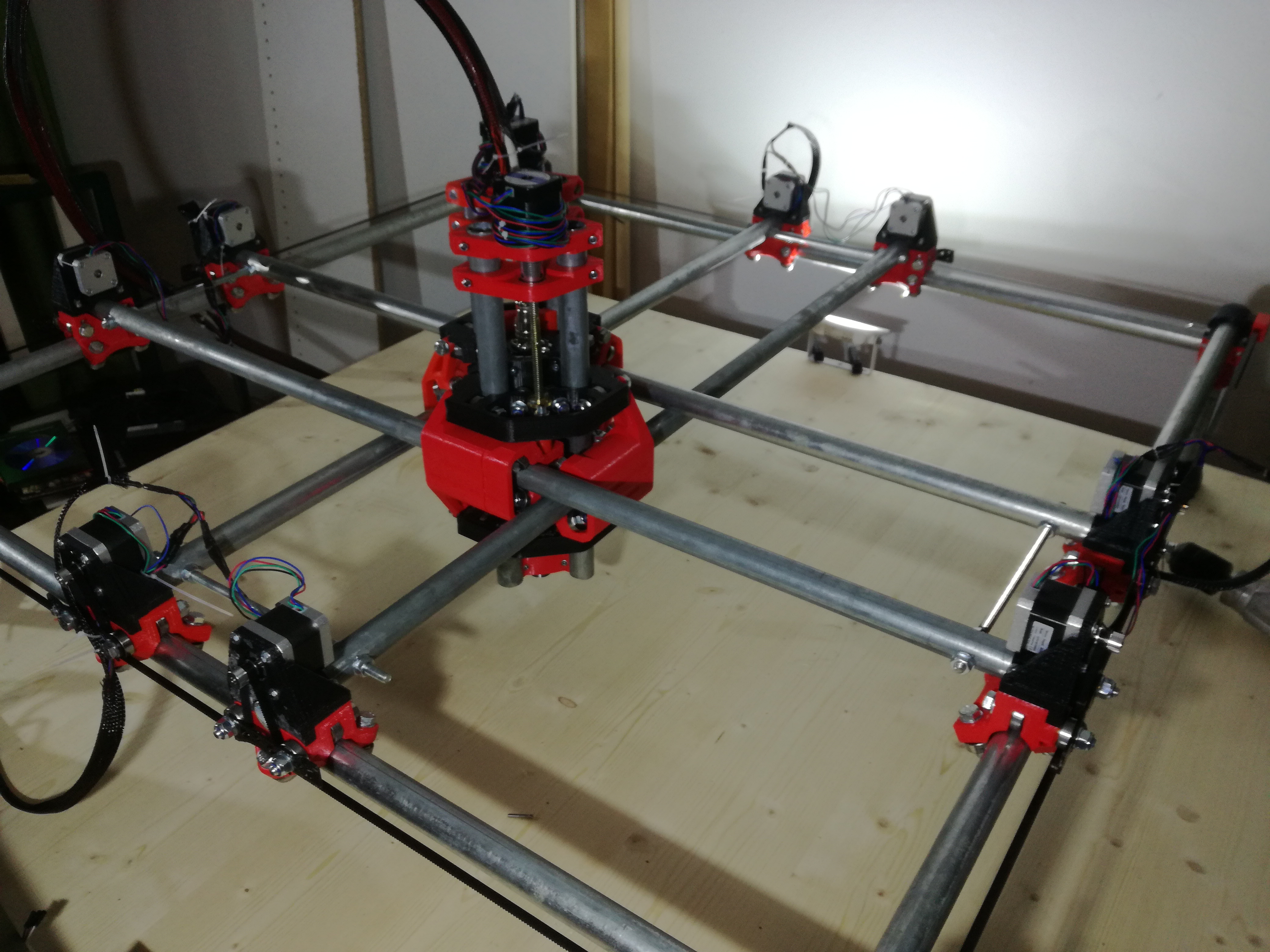
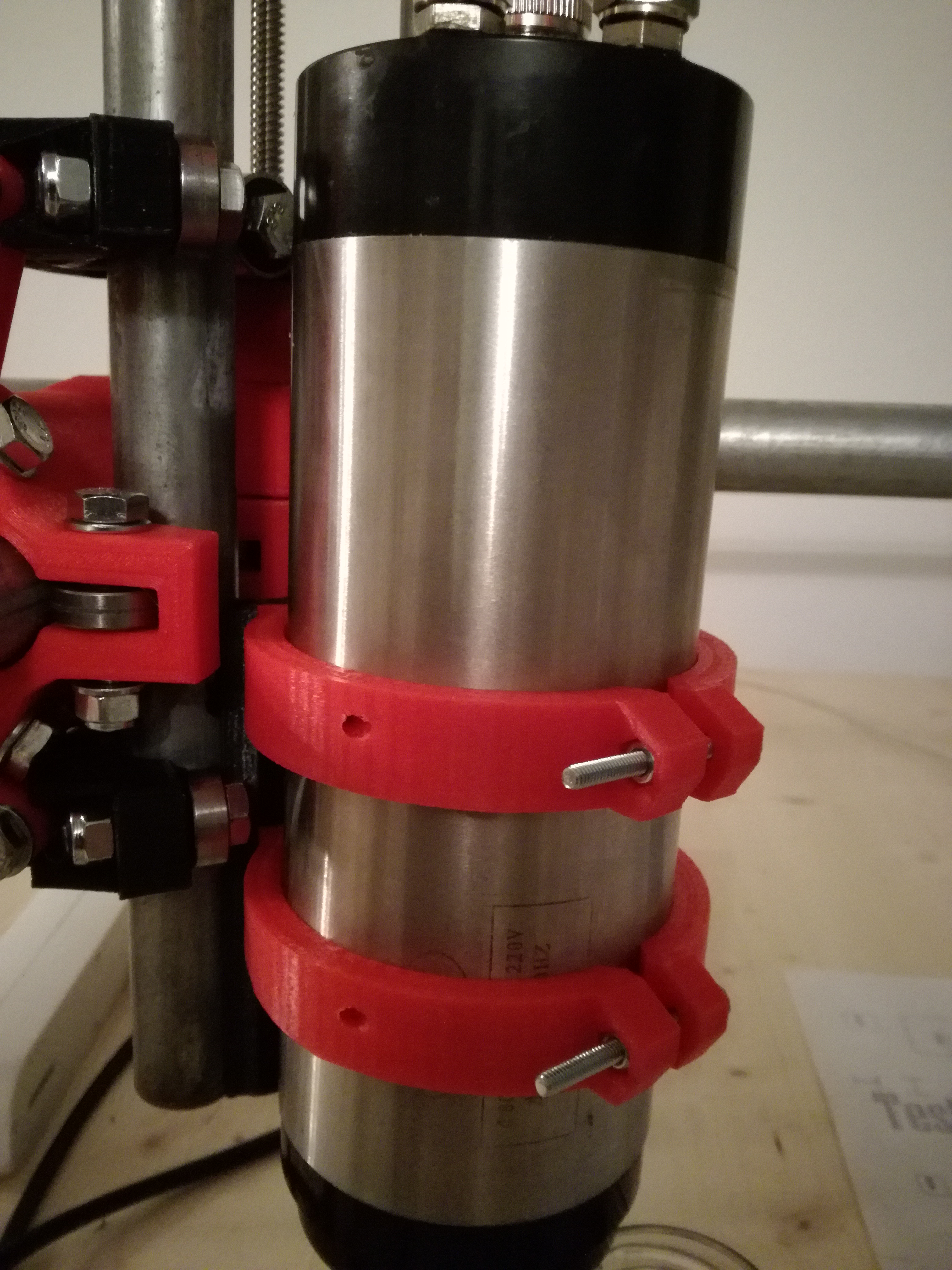
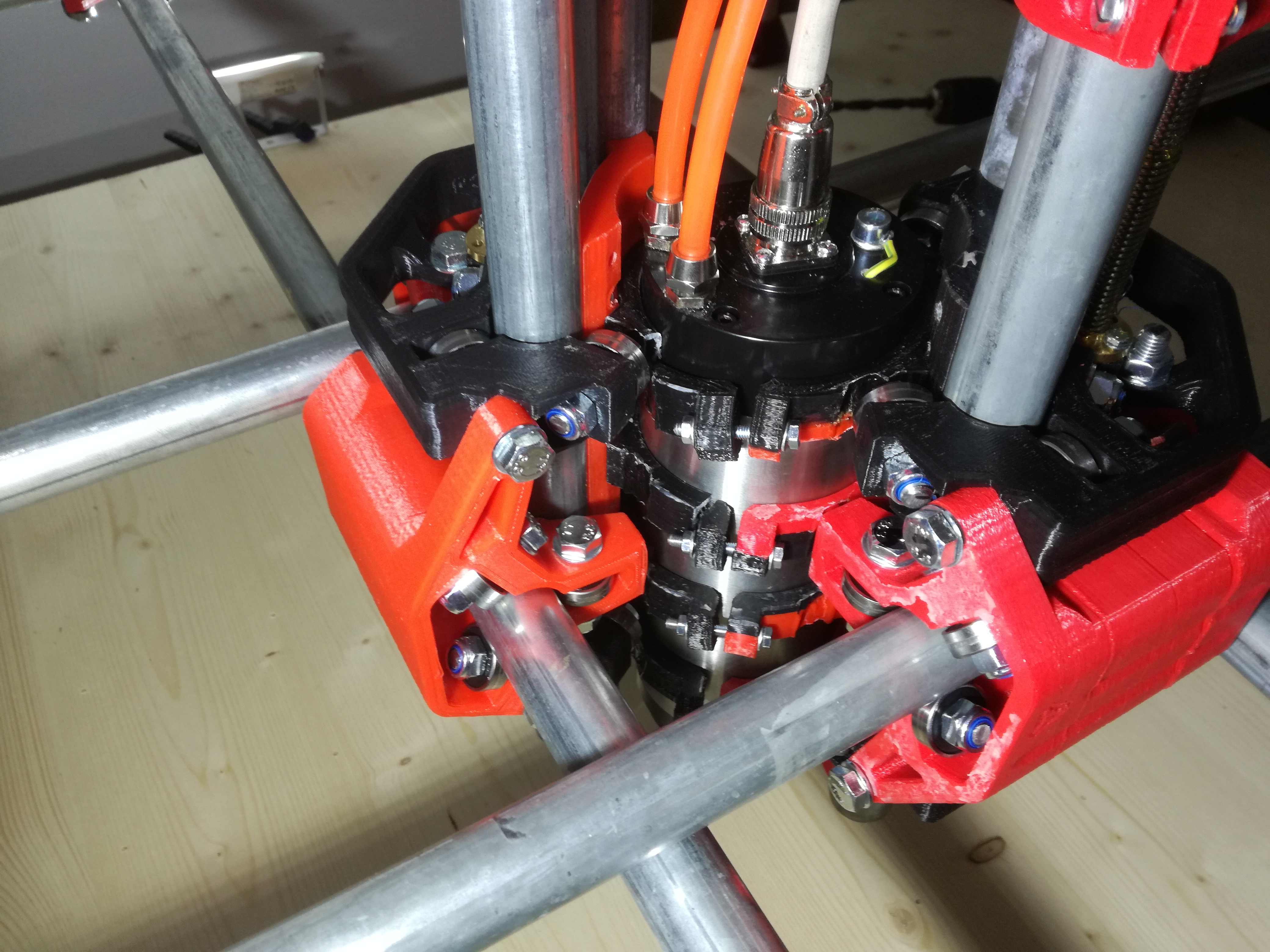
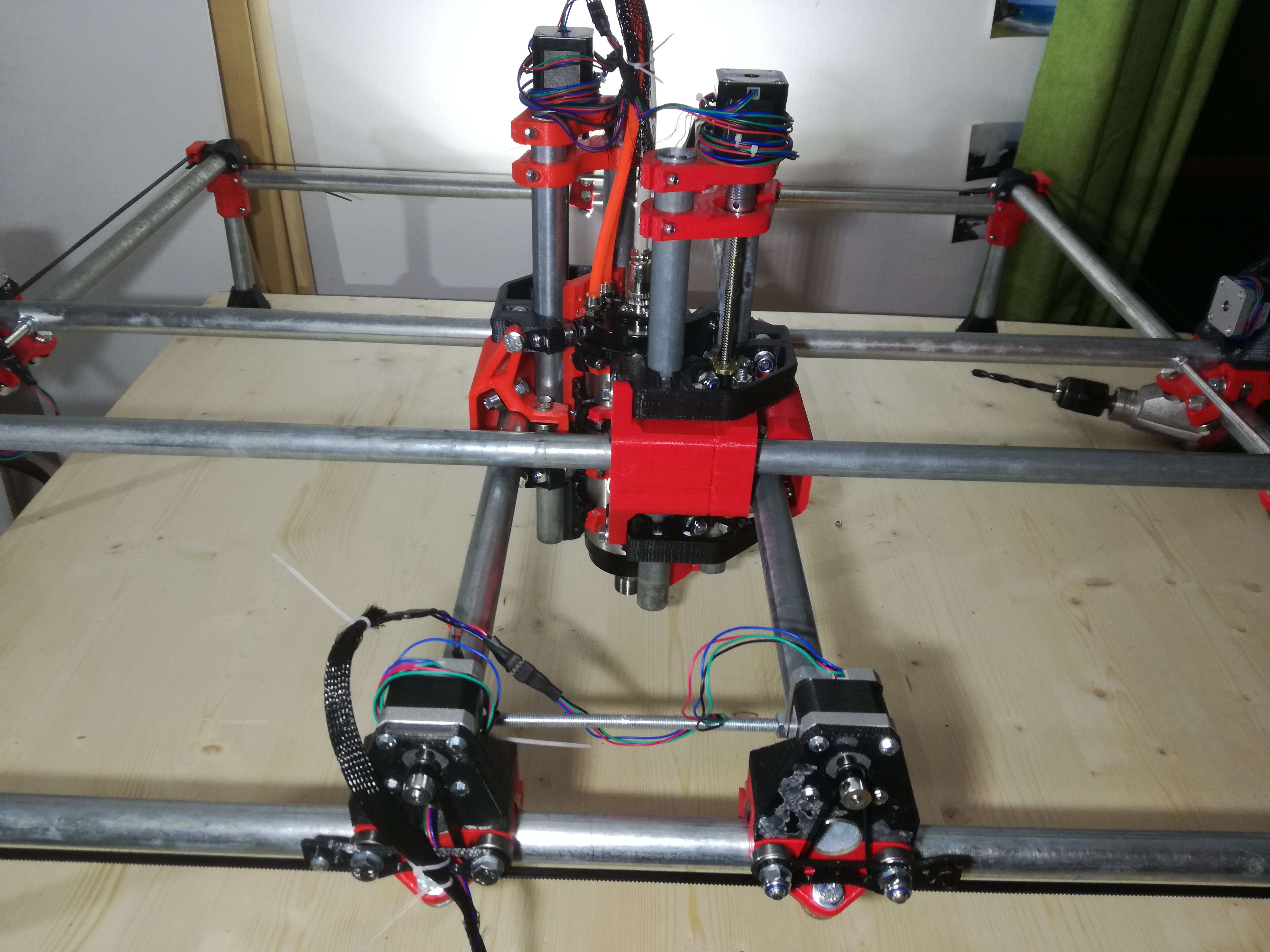
Zwei Z-Achsen die über die Spindel miteinander verbunden sind
Der mechanische Teil war relativ einfach umzusetzen – immerhin hab ich das alles ja schon einmal gemacht und ist exakt das gleiche – nur die Verbindung der beiden Einheiten ist neu. Im Endeffekt verwende ich die Spanner für die Spindel um die beiden Z-Achsen miteinander zu verbinden.
Den Rahmen etwas stabilisieren
Um die beiden parallelen Achsen auch wirklich parallel (und starrer) zu machen, habe ich sie am Rand mit einer M8-Gewindestange verbunden und mit Muttern gesichert.
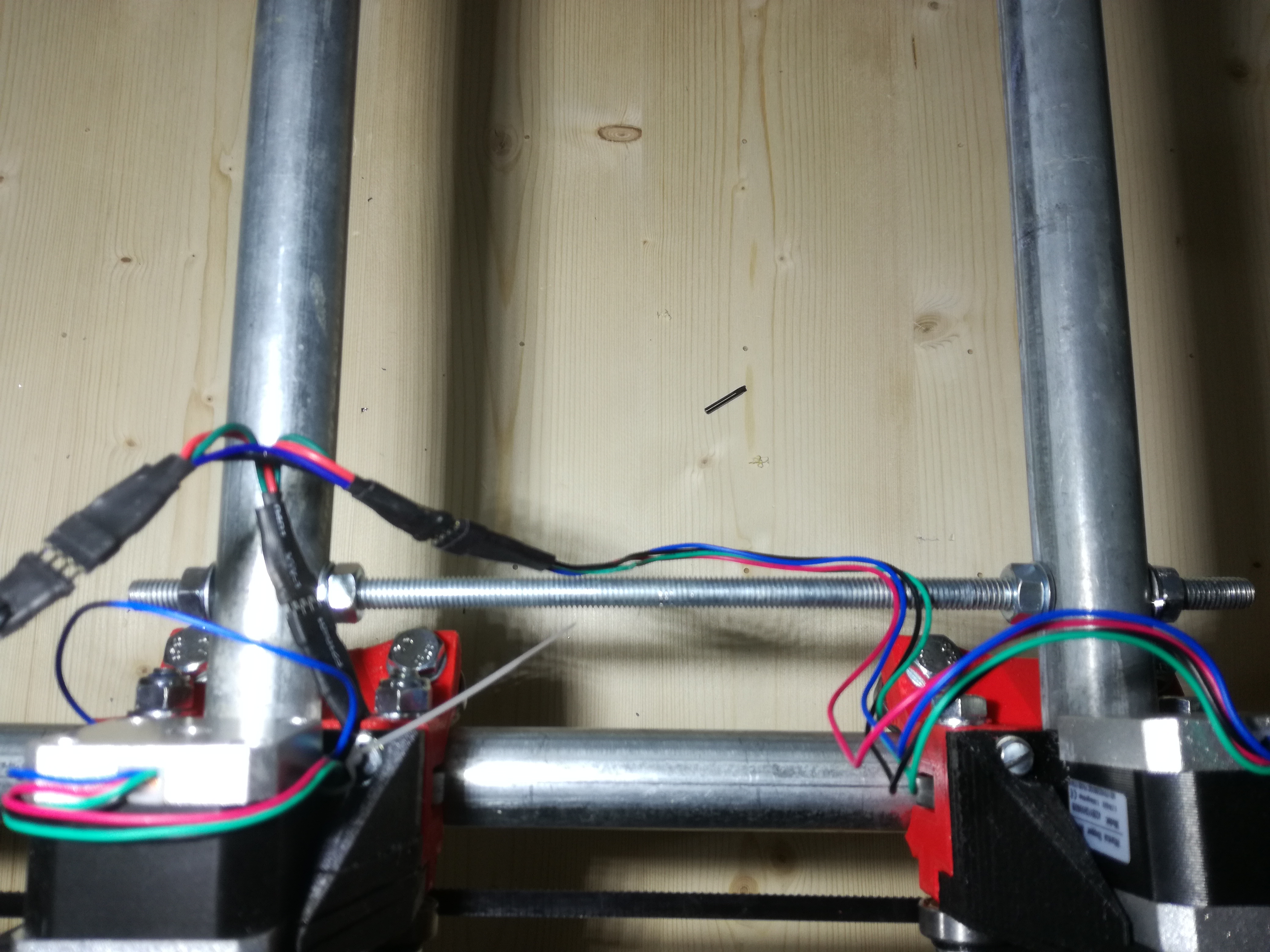
Ich musste zwar längere GT2-Riemen verwenden, da ich die ursprünglichen leider eher kapp abgeschnitten habe und sie für den zweiten Schrittmotor (bzw. die kleine Schleife) zu kurz waren.
(Fast) alles neu verkabelt
Und, ja, daraus ergeben sich dann für X/Y-Richtung insgesamt 8 Schrittmotoren – ich hab auf AliExpress ein relativ günstiges Angebot mit 20 Stück gefunden – und damit kann ich da jetzt aus dem Vollen schöpfen.
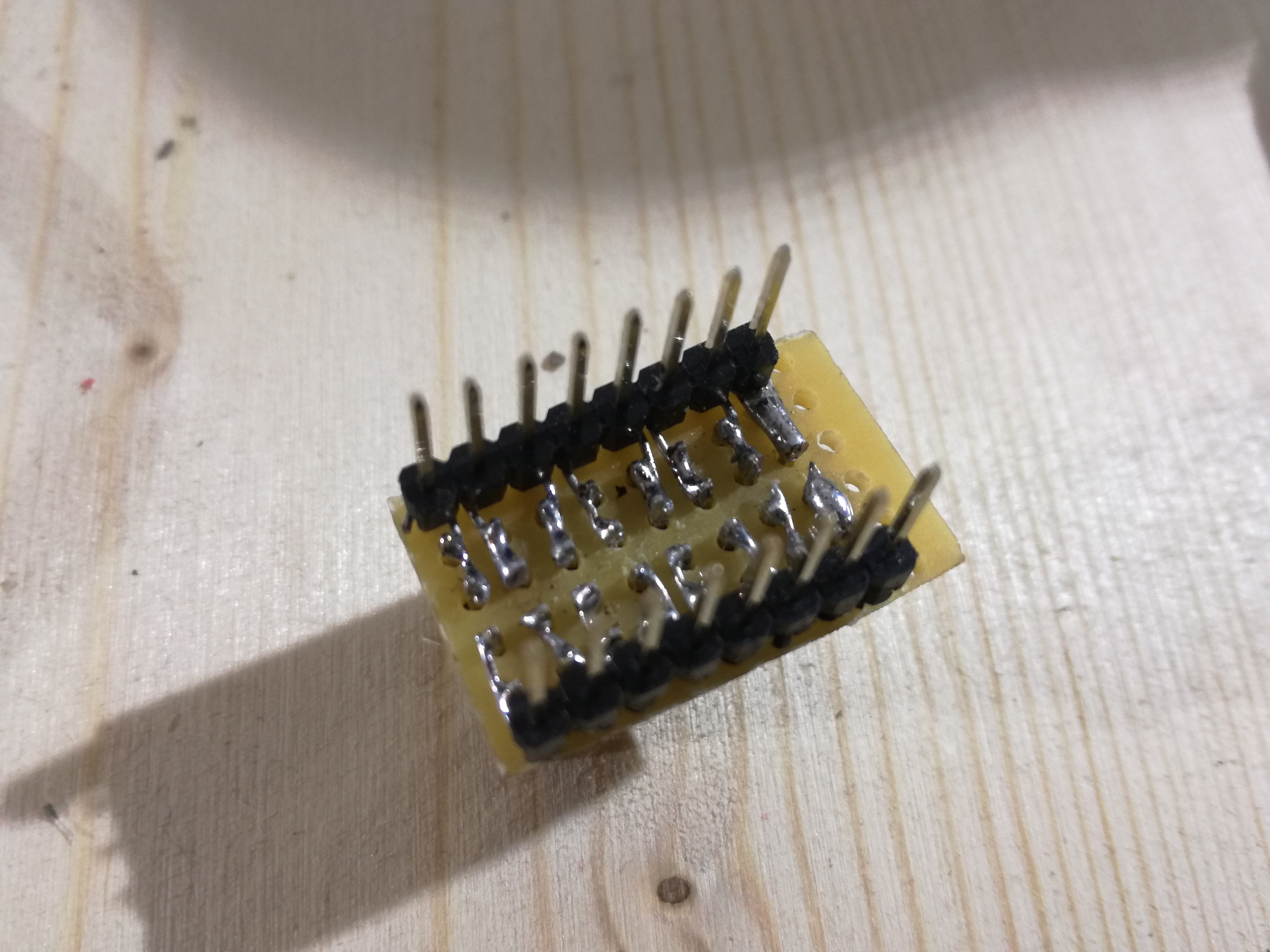
Allerdings wollte ich dann doch nicht vier Motoren auf einen Treiber hängen und so habe ich sowohl Y-Adapter für die Motoren (um jeweils zwei Motoren auf einen Treiber zu hängen) als auch Y-Adapter für die Treiber (um zwei Treiber auf einen Steckplatz am CNC-Shield zu hängen) gelötet.
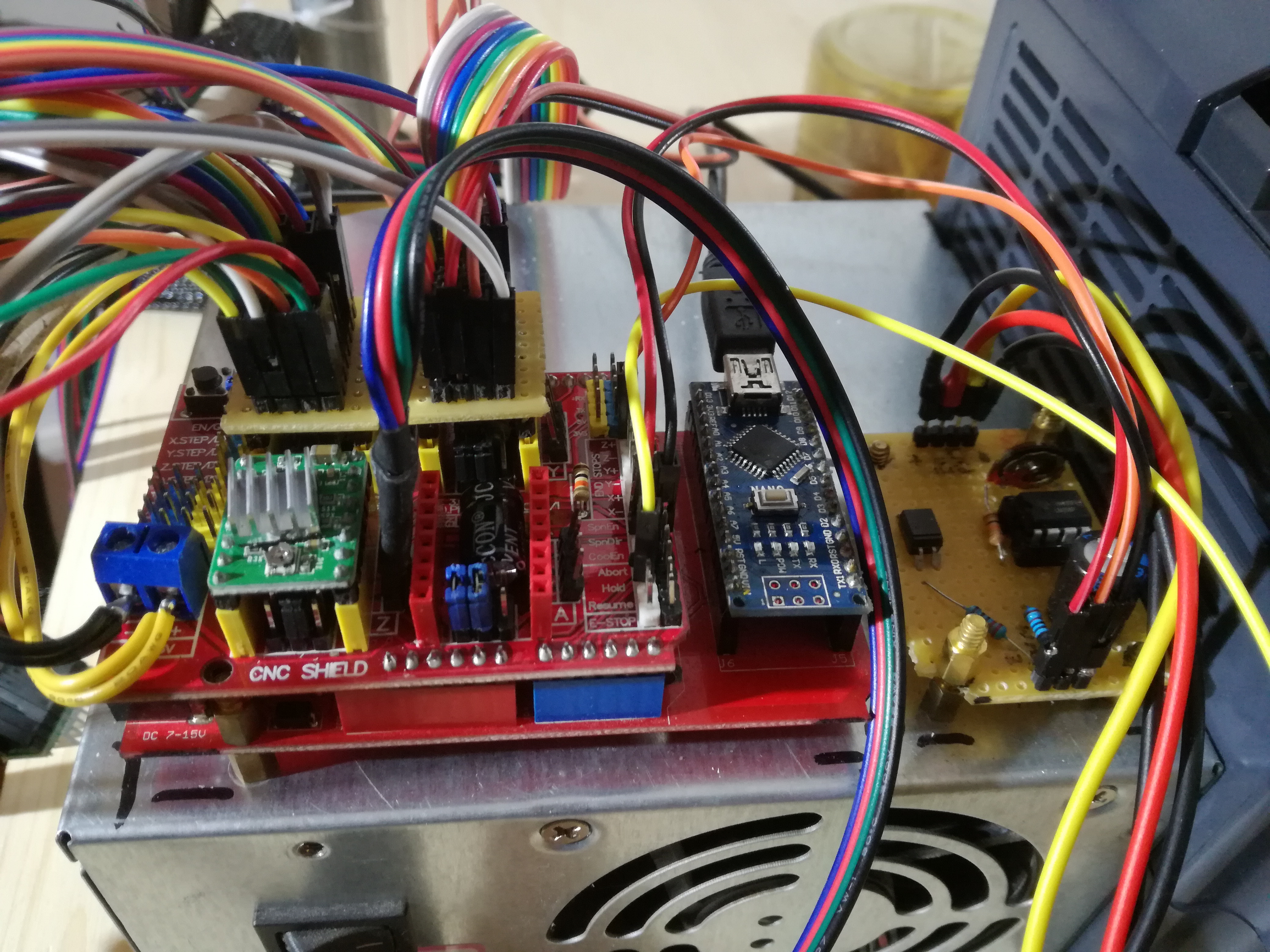
Die Z-Achse wird von „nur“ 2 Motoren getrieben und die hängen an einem Treiber.
Nachdem ich dann auch noch über die Info gestolpert bin, dass es von den A4988 Treibern zwei verschiedene Versionen gibt (vor/nach Jänner 2017) und ich danach die Referenzspannung für die Schrittmotoren richtig eingestellt habe, sind auch alle Achsen so gefahren wir ich mir das vorstelle.
Mir fehlt noch ein vernünftiges Untergestell und ein freundlicher Helfer um das Teil in den Keller zu verfrachten und dann steht einem zerspanenden Testlauf nichts mehr im Wege…